-
Investigation of EI Imbalance on C. elegans Locomotion
A balance between excitatory and inhibitory signaling (EI balance) in the brain is essential for maintaining normal brain function in animals including C. elegans. Proper EI balance allows for the C. elegans to have normal locomotion. C. elegans mutants, namely zf-35, express excessive excitatory signals, causing the worm to exhibit seizures and spontaneous backward pauses and reversals during locomotion [1]. To further investigate the link between EI imbalance and its associated behavioral effects on C. elegans, we use the C. elegans Whole Integration model to reproduce the zf-35 mutant using 3 methods: increased gains to backwards, backwards and forwards, and all excitatory neurons.
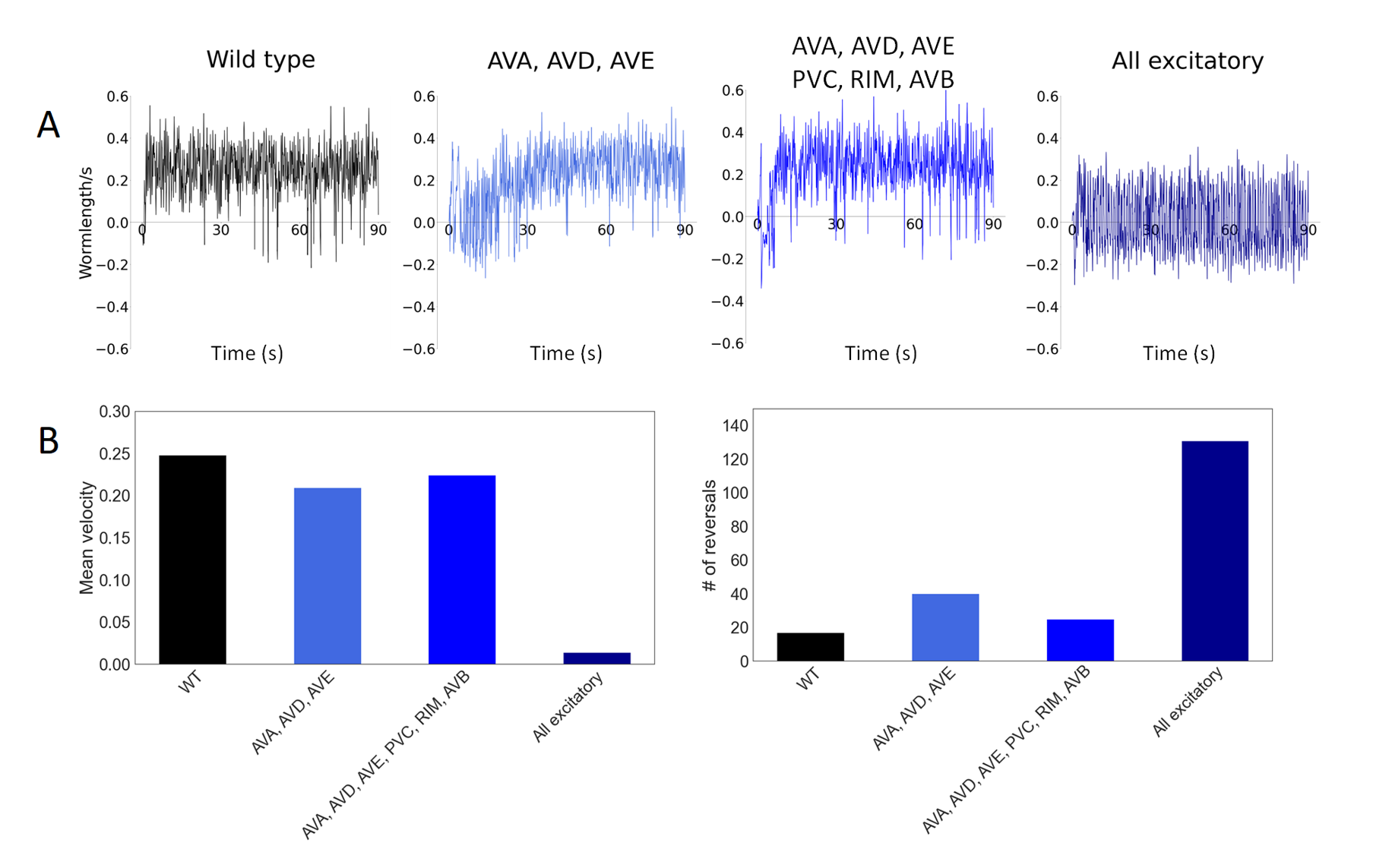
Emulating zf-35 mutant by increasing gains into AVA, AVD, AVE (backward neurons), AVA, AVD, AVE, PVC, RIM, AVB (backward + forward neurons) and all excitatory neurons. A: Instantaneous velocities (wormlength/s) of worm in 90 seconds; B: Mean velocity and number of reversals in 90 seconds.
Read More ...
-
Model variations for investigation of simulated behaviors
In this post we consider expandibility of the baseline model to investigate simulated behaviors. The baseline model has shown its ability to generate overall similar movements as in in-vivo experiments and to provide novel predictions. However, in depth analysis of motion shows that the characteristics of locomotion, such as eigenworm coefficients, do not precisely coincide with in-vivo values. Eigenworm coefficients are quantitative metrics describing the C. elegans posture during typical locomotion. We use this metric to evaluate the closeness of the simulated locomotion compared to in-vivo locomotion.
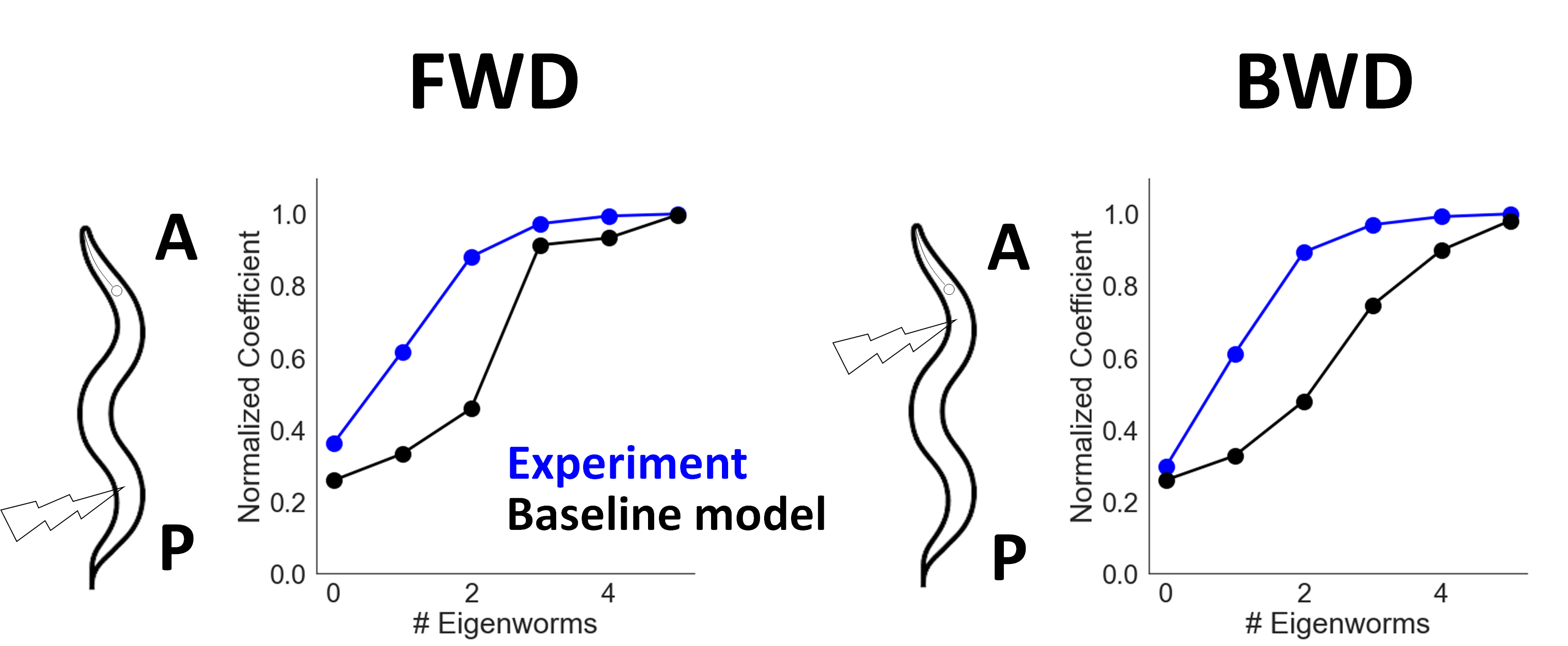 (Left: eigenworm coefficients of FWD locomotion, Right: BWD locomotion)
(Left: eigenworm coefficients of FWD locomotion, Right: BWD locomotion)As shown above, we see that there is a gap between the model obtained coefficients (black) and experiment (blue). This is unsurprising since the baseline model, by design, includes only “baseline” layers of individual neural dynamics and connections to reflect the dominant dynamic patterns and behavior. Novel experimental data shows that there are additional “higher order” properties that play role in neural activity and behavior such as spiking neurons, extra-synaptic connections, novel connectomics data. We incorporate these additional layers to the model to investigate their effects on simulated locomotion.
Read More ...
-
Varying fluid viscosity during locomotion
Experiments indicate that the environment plays a significant role in shaping coordinated movement. Here we explore environmental variations and their influence on C. elegans locomotion with respect to parameters such as fluid viscosity.
We compare the postures generated by the model to in-vivo experiments in which the viscosity of the surrounding agar fluid was altered by dropping a droplet of water (lower viscosity than agar). We mimic such an experiment by simulating the locomotion in two different viscosity values corresponding to either agar or water.
Changing fluid viscosity from agar (control) to water (low viscosity) - Experiment (Left), Model (Right)
Read More ...
-
Case study of the touch response
In this post, we link neural stimulation with feedback to examine mechanical touch induced locomotion responses. C. elegans responds to both gentle and harsh mechanical touches to its body via activating escape responses. If the touch is around anterior body region, it responds with backward locomotion whereas for posterior touch, it responds with forward locomotion. Theese responses are mediated by a group of sensory neurons distributed in both posterior and anterior body regions as shown below.
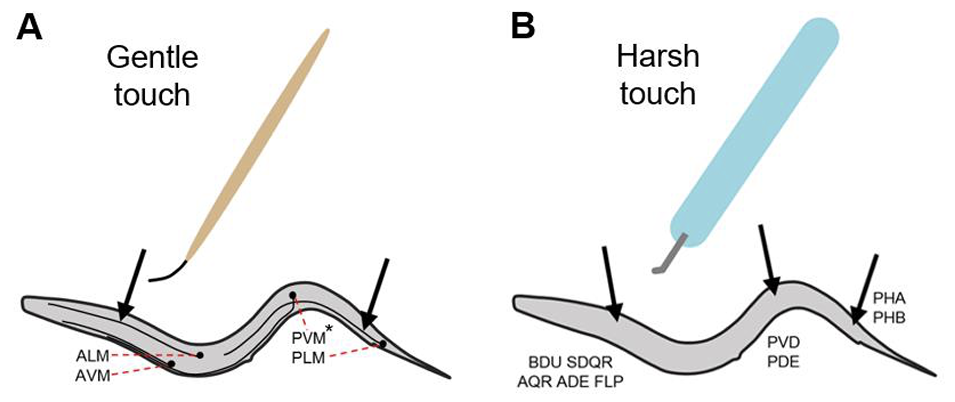 (image credit: Automated Analysis Of Experience-Dependent Sensory Response Behavior In Caenorhabditis Elegans, U of Pennsylvania)
(image credit: Automated Analysis Of Experience-Dependent Sensory Response Behavior In Caenorhabditis Elegans, U of Pennsylvania)Here we validate movements that the baseline model generates for gentle and harsh anterior/posterior touch and examine scenarios afterwards the effect of in-silico ablation on them. For gentle anterior/posterior touch, we stimulate ALM,AVM and PLM respectively. For harsh anterior/posterior touch, we stimulate FLP, ADE, BDU, SDQR and PVD, PDE respectively.
Read More ...
-
A worm in a box? Triggering sharp turns with RIV pulses
Sharp Ventral Turns: forward locomotion is interrupted by RIV stimulus
RIV motorneurons synapse onto ventral neck muscles and have been associated with the execution of sharp ventral head bend. A COOL demo of this is an in-vivo scenario by Alkema lab showing that they can confine C. elegans in a rectangular region by stimulating RIV each time the worm reaches the boundary of that region.
With CelegansWholeIntegration we wanted to explore the effects of additional neural stimuli on forward locomotion. Such a scenario is a great test case to see if we can reproduce it. We set the CelegansWholeIntegration worm to perfrom forward locomotion, i.e., without pulses of RIV stimuli the trajectory of the worm would move with in the same direction as it was initialized. Then while the worm moves forward we stimulate RIV neurons (for 3 seconds) each time the anterior part is about to reach the boundary of a white region and we generate the video below:
Read More ...
-
Changing locomotion direction through additional pulses of neural stimuli (Avoidance)
Once we have generated baseline forward and backward locomotion movement with CelegansWholeIntegration we explore the effects of stimulating additional neurons (with short pulses) during locomotion. First scenarios that we explored are neural triggers identified experimentally to change the course of movement. In this post we describe the avoidance pulse: stimulation of ALM + AVM.
Avoidance: forward locomotion is interrupted by ALM+AVM stimulus
When ALM+AVM are stimulated in-vivo during forward locomotion, C. elegans reacts to the change by stopping and reversing. In the video below we initiate forward locomotion and after 6 seconds apply ALM+AVM neural stimulation for 2 seconds.
Read More ...
-
Generating baseline locomotion - forward and backward
First movements that we generate with CelegansWholeIntegration are baseline forward and backward locomotion movements. These movements are similar in shape to translating sinusoidals. The video below was recorded in an experimental lab and demonstrates the body postures involved:
In this video, C. elegans initially moves forward and then when receives a mechanical stimulus (touch in the anterior part) switches direction and moves backward. While there is variation in postures these are pretty typical. Such a response is called the tap withdrawl.
To generate baseline forward and backward movements with CelegansWholeIntegration we design a force wave travelling along the body with variable frequency to infer neural dynamics associated with it.
Read More ...
-
Welcome to C. elegans Whole Integration Blog!

Welocome to the blog of CelegansWholeIntegration! Here we will post videos of scenarios of C. elegans locomotion studied using CelegansWholeIntegration model. We will post scenarios reported in the mansucript and additional ones that we are obtaining with the model. With the blog we hope to create a collection of scenarios together with experimental and computational community. The collection will help enhance the model and potentially contribute to better understanding of mappping neural dynamics to body movements.
We will also notify here of anticipated code release (its coming up soon!) and notify regarding updates.
Read More ...
This blog is part of CelegansWholeIntegration repository. We are preparing to release the code and will notify about the release in this blog. Also refer to CelegansWholeIntegration preprint for additional details about the work: BiorXiv Preprint.